I joined the Sumo section of the University of Toronto Robotics Association, which focuses on building the circuits, chassis, and coding of an autonomous robot that will compete against other robots by pushing them out of a ring, much like sumo wrestlers.
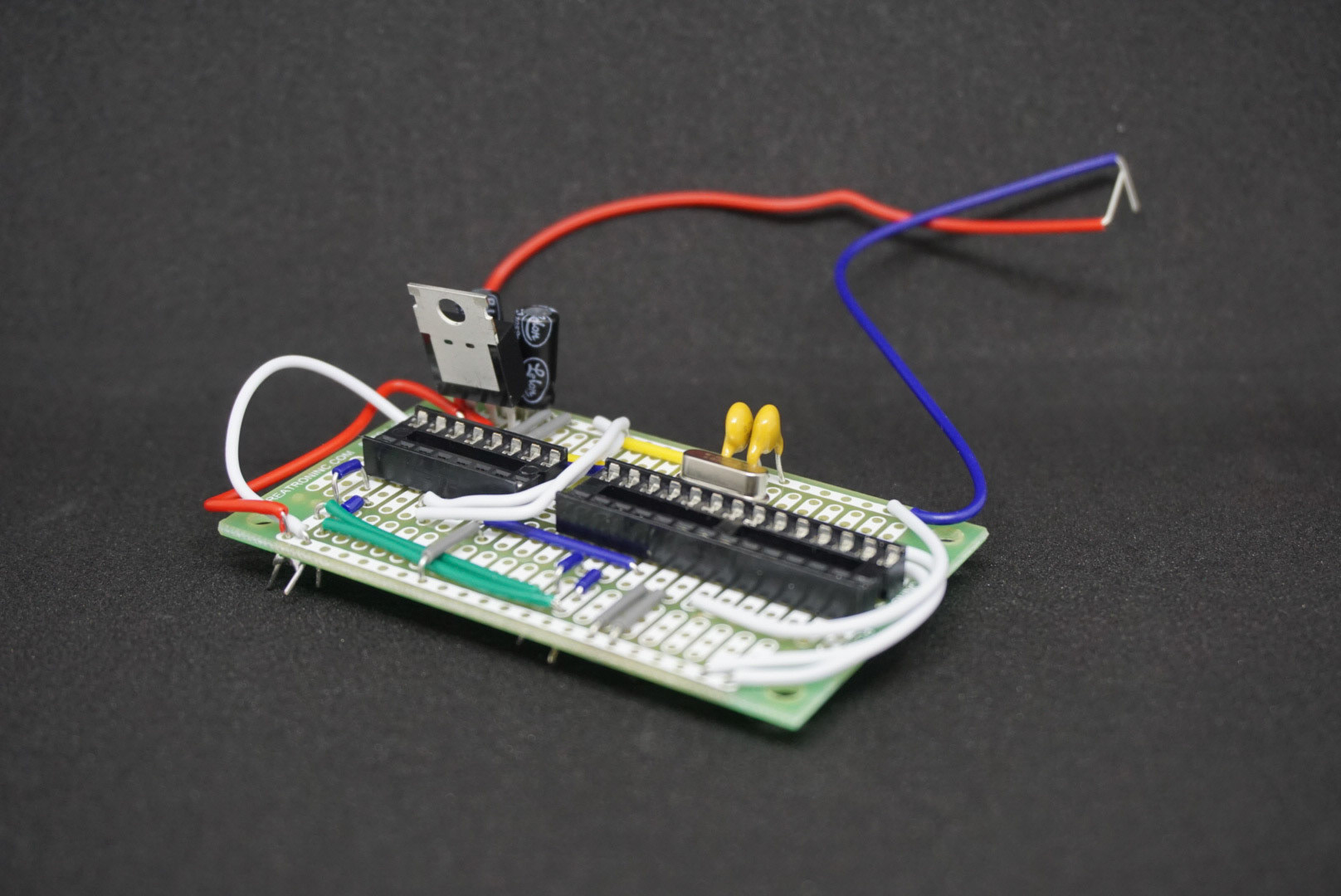
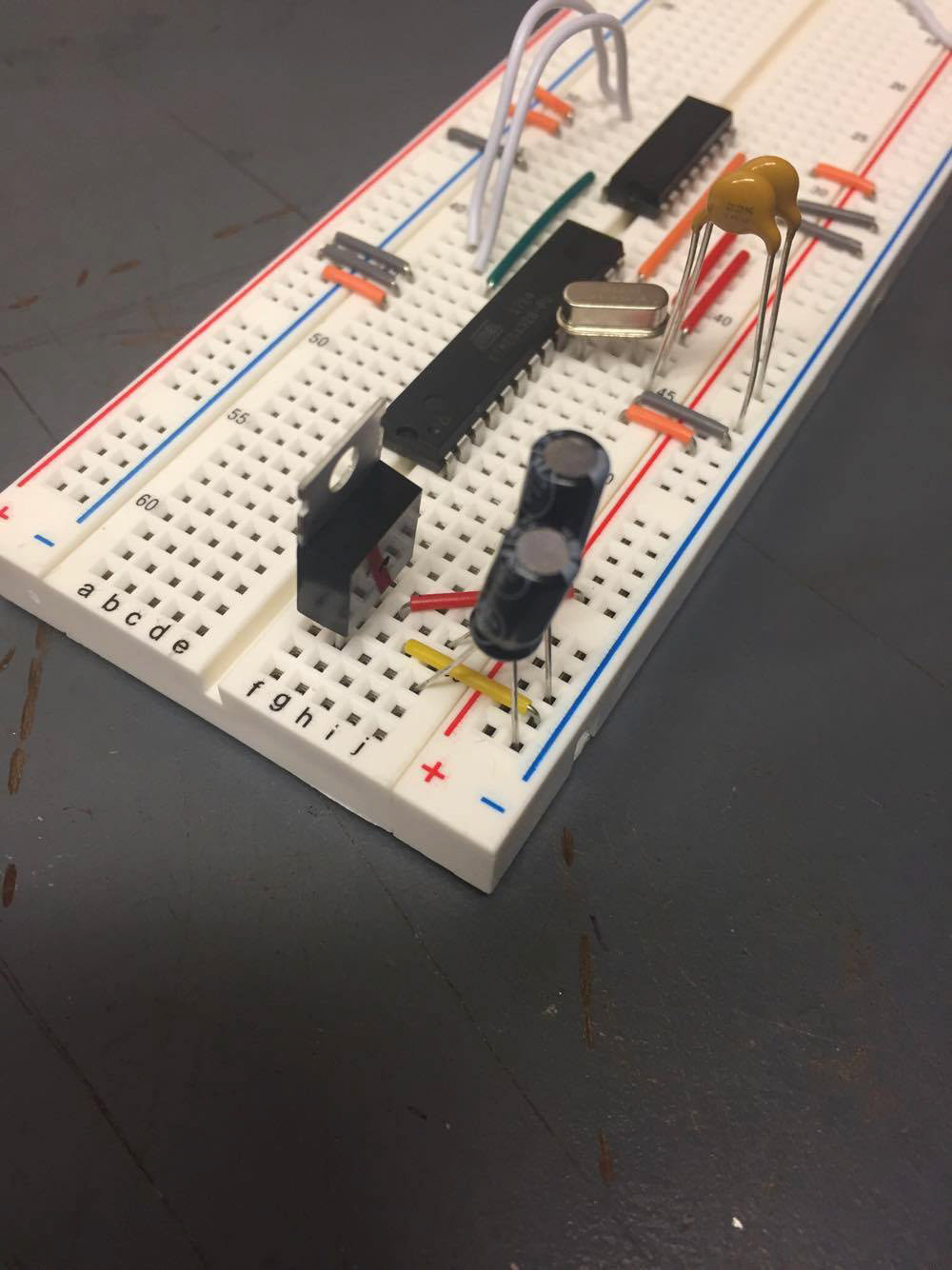
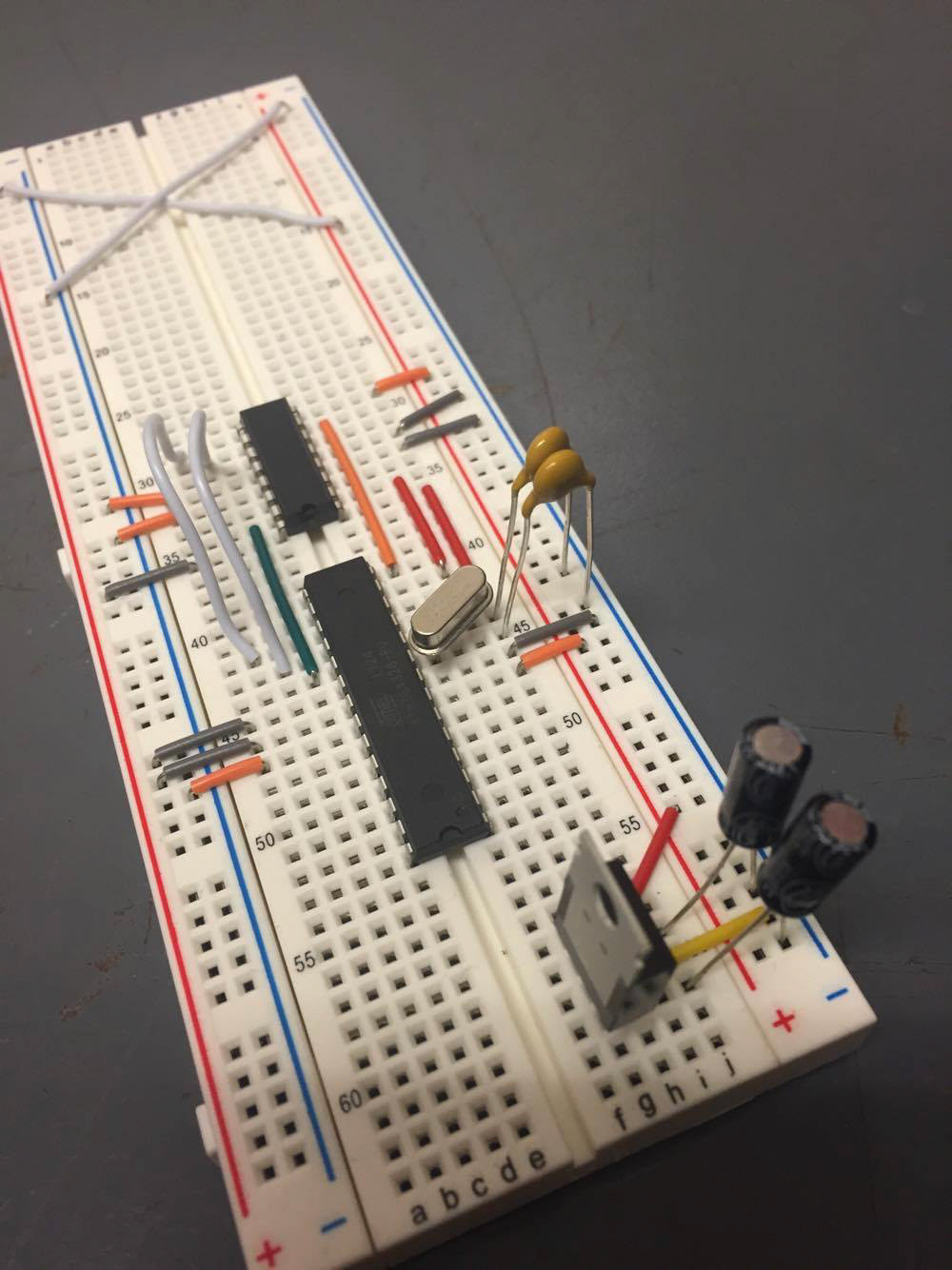
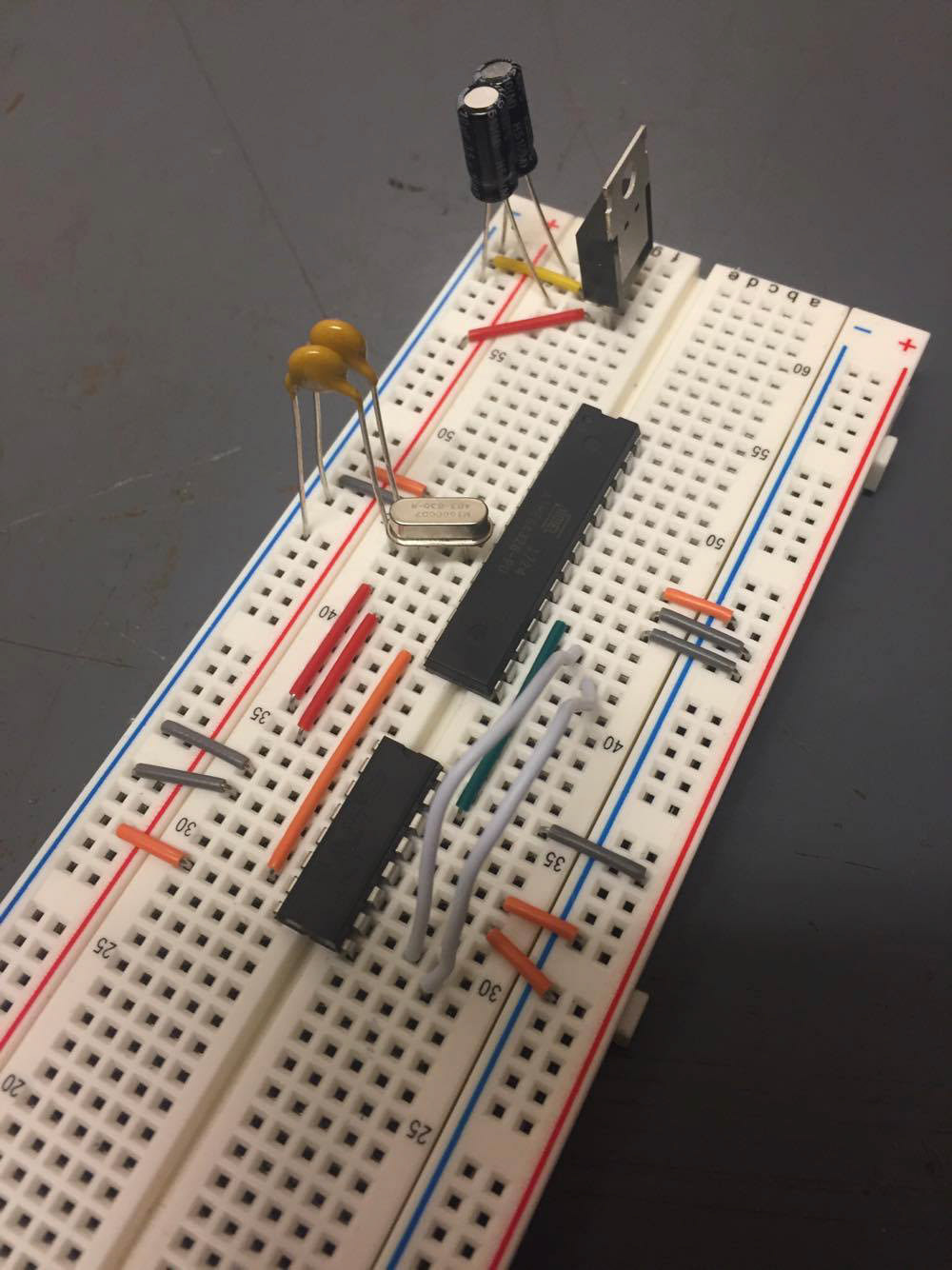
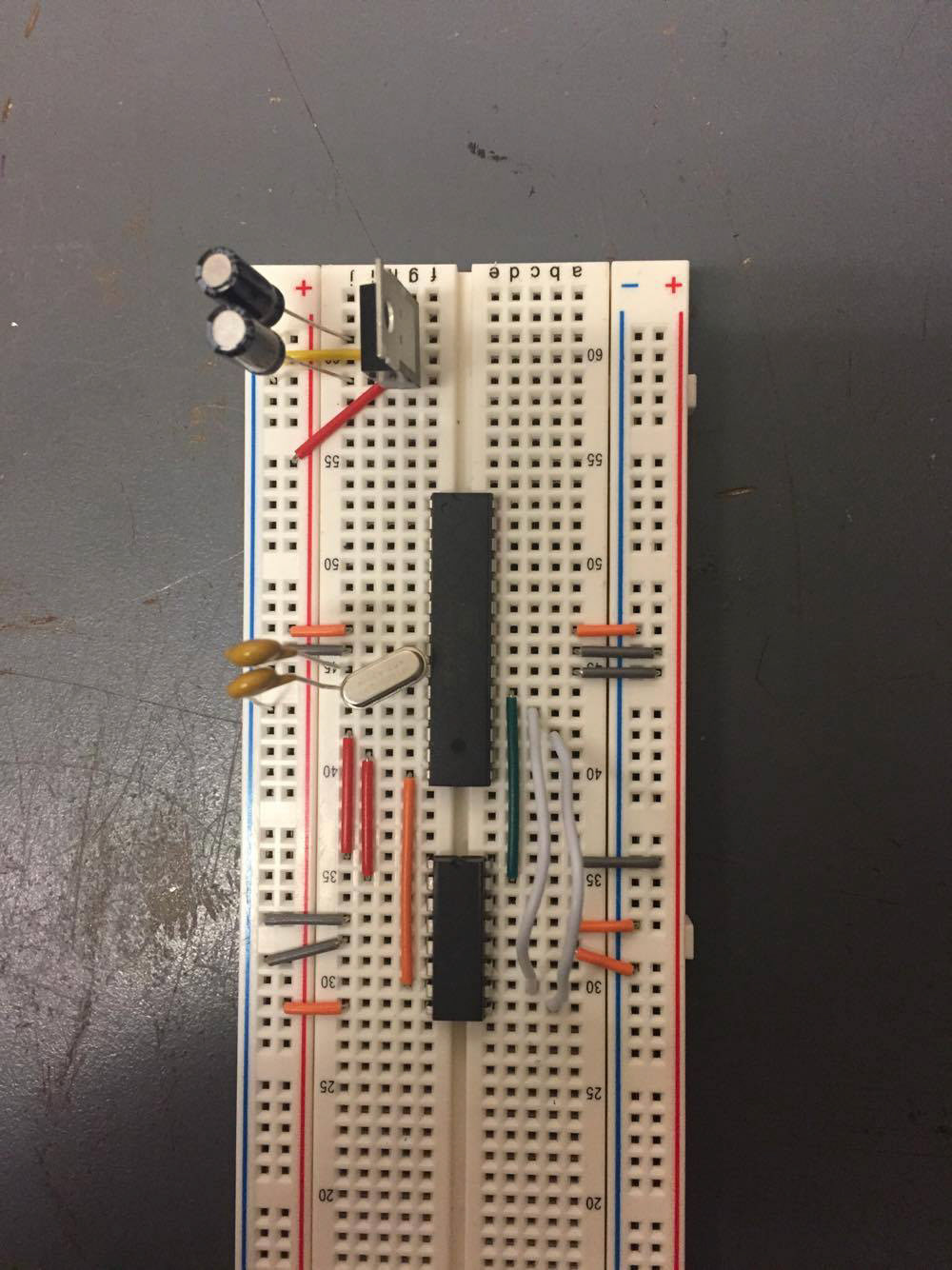
The circuit shown above is the prototype for controlling the robot using an ATmega328p micro controller. It runs on a 9 volt input from a battery and reduces the voltage to 5 volts for the rest of the circuit. The motor driver shown is the L293D. When tested using a preprogrammed micro controller, the circuit performed successfully without any over heating or damage.
Below is the soldered board. Unfortunately, after this picture was taken, the board was damaged and had to be resoldered. The current design gives the motor driver 5V but I plan on increasing the input voltage to eighteen to allow the motors to run faster.